Bloc "Attendre" et d'autres capteurs
1. Les capteurs
Voici d'autres capteurs que vous utiliserez avec les blocs de programmation "Attendre" et "Sélection" et qui permettra au robot de capter des éléments de son environnement.
Les capteurs
|
Capteur tactile
Le capteur tactile est un interrupteur: il est possible de l'enfoncer ou de le relâcher. Il se branche dans le port 1. 
|
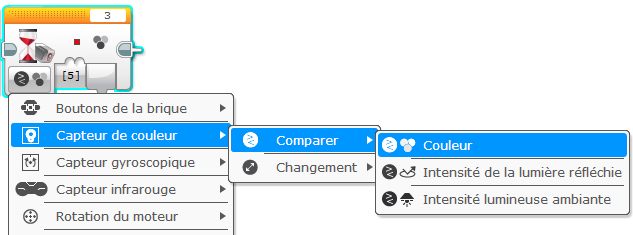
Capteur de couleur
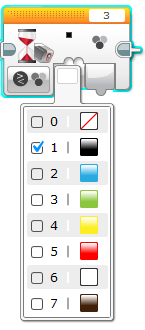
Le capteur de couleur peut identifier la couleur ou l'intensité de la lumière pénétrant par la petite fenêtre sur la face avant du capteur. Le capteur de couleur comprend trois modes : Couleur, Intensité de la lumière réfléchie et Intensité lumineuse ambiante. Il se branche dans le port 3. 
|
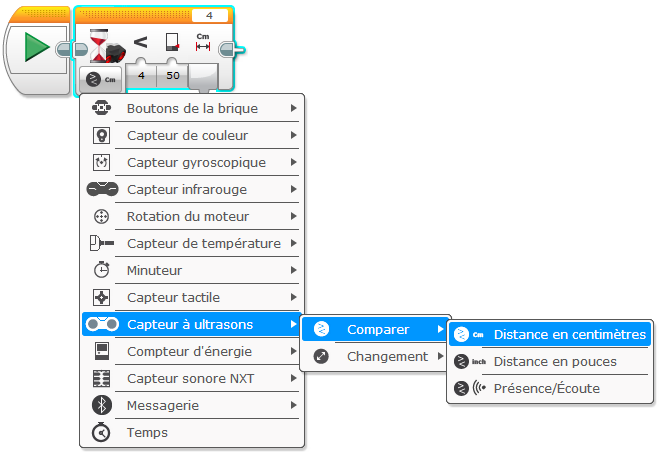
Capteur ultrasons
Le capteur ultrasons permet au robot de voir et reconnaître des objets, d'éviter des obstacles, de mesurer des distances et de détecter des mouvements. Il est efficace entre 3 cm et 250 cm (avec une précision de +/-1 cm). Vous pouvez également utiliser le capteur à ultrasons pour détecter la proximité d'un autre capteur à ultrasons en fonctionnement. En mode Présence, le capteur écoute les signaux sonores, mais n'en émet pas. Il se branche dans le port 4. 
|
Pour plus d'information sur les capteurs, utiliser le menu Aide du logiciel EV3.
2. Bloc "Attendre" et les capteurs
Introduction: comprendre le bloc "Attendre"
Le bloc "Attendre" est utilisé avec les capteurs. Le robot avance à l'infini et lorsqu'il détecte son environnement avec un capteur, on le fait réagir. Par exemple, le robot avance et lorsqu'il détecte un objet à moins de 30 cm avec le capteur à ultrasons, il s'arrête et change de direction.
Bloc «attendre» |
Bloc «attendre»: choix du capteur: le capteur à ultrasons |

|
|
Bloc «attendre»: choix du capteur: le capteur de couleur
|
|

Ce(tte) œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.
