Projet 2 Le détecteur de mines
Déplacements avancés (déplacements avec capteurs)
|
Savoirs qui seront mobilisés dans ce projet
|
|

Défi de programmation
|
Défi 1: Le détecteur de mine et la base en 3 dimensions |
N'oublie pas l'étape de planification obligatoire. Tu dois la faire approuver par ton enseignant avant de procéder à la programmation formelle.
Votre robot est en mission et il doit détecter des mines afin de permettre aux gens de se déplacer sans danger. Voici les instructions de programmation:
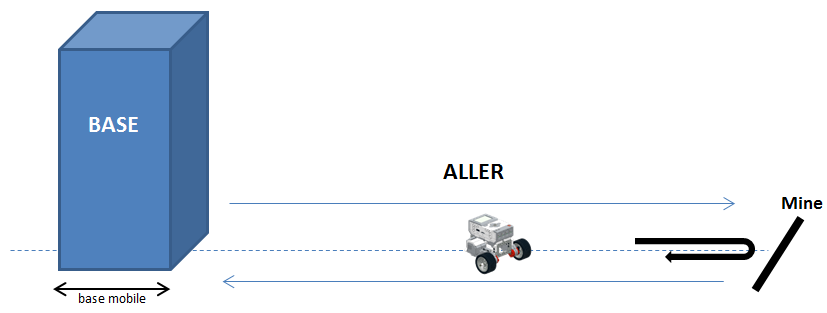
- Observer le schéma ci-dessous.
- Le robot militaire part de sa base (objet à 3 dimensions), se déplace, mais s'arrête lorsqu'il détecte une mine (ligne noire).
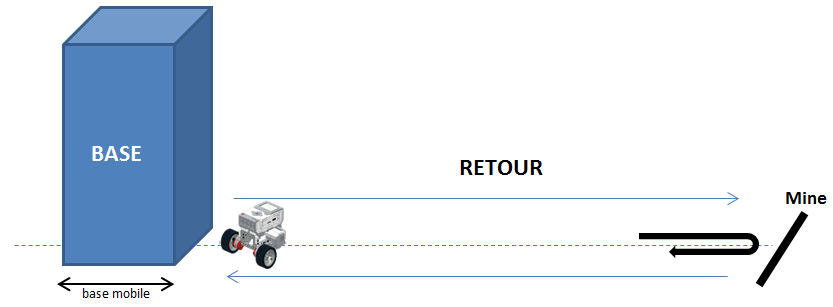
- Une fois arrêté, il émet un son, affiche "Mine", pivote de 180 degrés, et revient à sa base. Il ne faut pas que le robot passe sur la mine, évidemment.
- Attention! La base peut changer de place d'une mission à l'autre, afin de ne pas être découverte par l'ennemi (le long de l'axe en pointillé).
- Au retour, le robot doit s'arrêter tout près de la base, sans y toucher, et émettre un son.
- Élaborer la programmation sur votre ordinateur en utilisant le moins de blocs possibles.
|
|

Défi de programmation
|
Défi 2: Le détecteur de mine et la base en 2 dimensions |
Votre robot relève le même défi que le défi 1, avec les variantes suivantes:
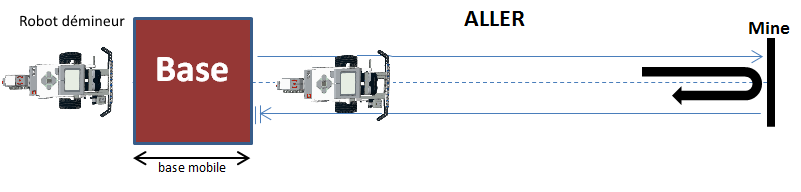
- Dans le schéma ci-dessus, la base passe de 3 à 2 dimensions, elle est d'une couleur autre que noir ou blanc.
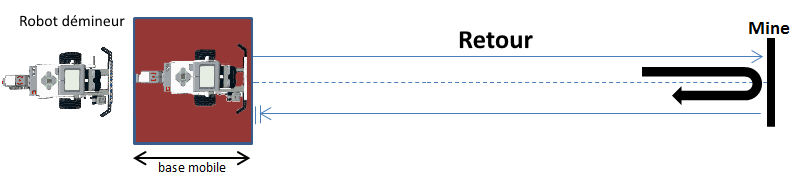
- Le robot doit revenir à la base après avoir détecté la présence de la mine.
- Une fois la base détectée, il doit se stationner en prenant place sur celle-ci (ou dans espace défini), transmettre les informations nécessaires au robot démineur qui effectuera alors la programmation qu'il contient déjà.
|
|

|
Tu ne sais pas comment réaliser les projets? Tu as des questions? Avant d'aller voir ton enseignant, tu as des ressources à ta disposition: |
|
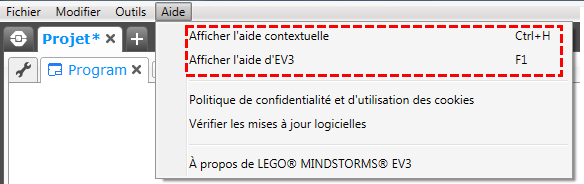
Les outils d'aide du logiciel
|
Les pages théoriques suivantes:
Les défis suivants:
|

Ce(tte) œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.
