Activité 5 Bloc "Attendre" et capteur gyroscopique
Description : Dans cette activité, vous apprendrez à programmer votre robot pour qu'il tourne selon un angle donné.
Matériel requis :
Matériel requis :
- Ordinateur
- Robot
Introduction: fonction du bloc "Attendre"
Ce bloc force le robot à examiner son environnement afin d'y détecter une condition précise avant de continuer.
Il est possible d'utiliser, avec ce bloc, l'information provenant des différents capteurs.
Ces capteurs agissent donc comme vos sens.
1. Le bloc "Attendre" et le capteur gyroscopique
Lorsque la surface sur laquelle le robot est déposé est particulièrement glissante, les rotations peuvent devenir imprécises. Il devient avantageux d'utiliser le capteur gyroscopique pouir effectuer les rotations.
|
Capteur gyroscopique
Le capteur gyroscopique détecte les mouvements de rotation.Il peut détecter la vitesse de rotation en degrés par seconde quand il tourne dans le sens des flèches. De plus, le capteur gyroscopique enregistre l'angle de rotation total en degrés. Il se branche dans le port 2. |


Bloc de programmation
|
Capteur gyroscopique (port 2)
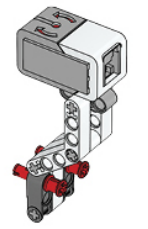
Cliquer l'image pour atteindre le guide de montage
|
2. Programmer le bloc "Attendre" et le capteur gyroscopique
Pour utiliser le capteur gyroscopique afin de faire tourner le robot, il faut utiliser le bloc "Capteur gyroscopique" et le bloc "Attendre avec le capteur gyroscopique".
|
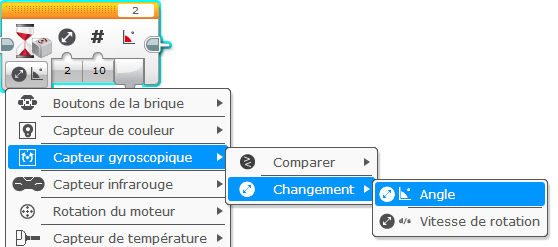
1. Pour choisir le capteur gyroscopique dans la palette "Capteur"
|
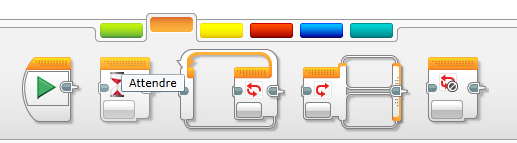
2. Choisir le bloc attendre dans la palette «Contrôle du déroulement»
|

|
|
La programmation à l'aide du bloc «capteur gyroscopique»
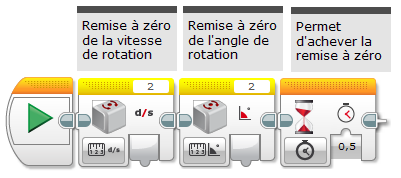
Étape 1: la réinitialisation du capteur gyroscopique
|
Cette première étape sert à réinitialiser (remettre à zéro) deux composantes du capteur: sa vitesse de rotation et son angle de rotation. Il suffit de faire ces actions une seule fois au début d'une programmation qui utilise ce capteur.
|
|
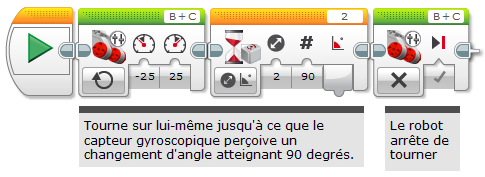
Étape 2: faire tourner le robot avec l'aide du capteur gyroscopique
|
Cette programmation permet au robot de pivoter de 90 degrés autour d'une roue bloqué.
Testez cette programmation. |
|

Défi de programmation
|
Défi de programmation 1: Des figures géométriques
|
|
1. Faire un carré
|
|
2. Faire un rectangle
|
|
Note: Utiliser le bloc mathématique pour transmettre le nombre de rotations au robot pour ses divers déplacements.
Utilisation de créateur de «Mon bloc»
|
Comme nous pouvons le voir dans l'exemple précédent, récrire chaque fois une procédure pour utiliser efficacement un bloc peut être une opération longue et fastidieuse. Le bloc « Mon bloc» vient à notre rescousse. Il permet de réutiliser une partie d'un programme, dans un autre programme. Cliquer sur le bouton pour en apprendre plus.
|

|

Défi de programmation
|
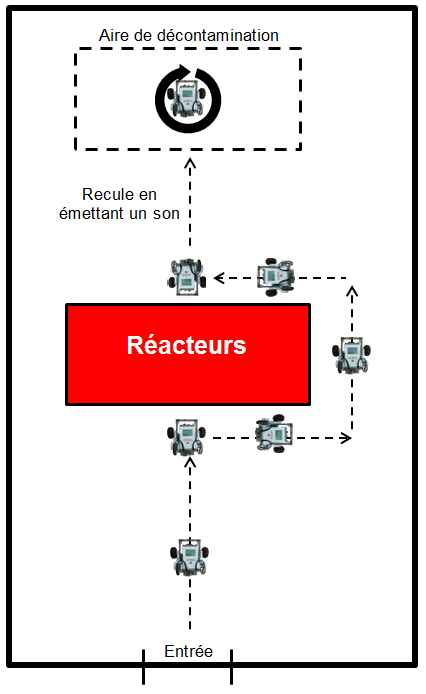
Défi de programmation 2: Inspection d'une centrale nucléaire
|
Votre robot doit inspecter la salle des réacteurs afin de s'assurer du bon fonctionnement de ceux-ci, tel qu'illustré sur le schéma ci-dessous.
- Le robot doit avancer lentement vers les réacteurs;
- Il doit ensuite prendre 2 mesures de radioactivité: une à l'avant, l'autre à l'arrière des réacteurs (au centre des côtés du rectangle, en faisant face aux réacteurs à chaque fois); le robot doit s'approcher à 5 cm, maximum, des réacteurs afin que les mesures soient précises; chaque mesure doit durer 3 secondes; le robot doit ensuite émettre le même son et afficher la même image à la fin des 2 mesures;
- Il recule ensuite en émettant un son tout au long de son déplacement arrière (voir "Zone vidéo" au besoin);
- Dans l'aire de décontamination, il pivote lentement sur lui-même (un tour complet), afin de subir une décontamination complète.
|
Zone vidéo: programmation en parallèle, le robot émettra un son tout le temps du déplacement arrière

Pour faciliter la programmation
En cliquant sur l'image ci-bas, vous obtiendrez une page vierge de programmation contenant les instructions du défi. Il ne vous reste qu'à faire la programmation.
|

|
|
- Comment avez-vous procédé pour relever ce défi?
- Quelles ont été vos difficultés?

Ce(tte) œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.
