4. Défi de la canette
Description de l'activité : Dans cette activité, votre robot devra réussir une course à obstacle.
Matériel requis :
Matériel requis :
- Ordinateur
- Robot

|
Robot et obtacles: le défi de la canette |
Comme indiqué sur le plan suivant ,
- Vous aurez à placer votre robot sur le point de départ;
- Il avancera et contournera l’obstacle A;
- Il devra ensuite aller pousser la canette B;
- Il reculera et ira ensuite toucher à l’obstacle C;
- Finalement, il avancera vers le point d’arrivée.
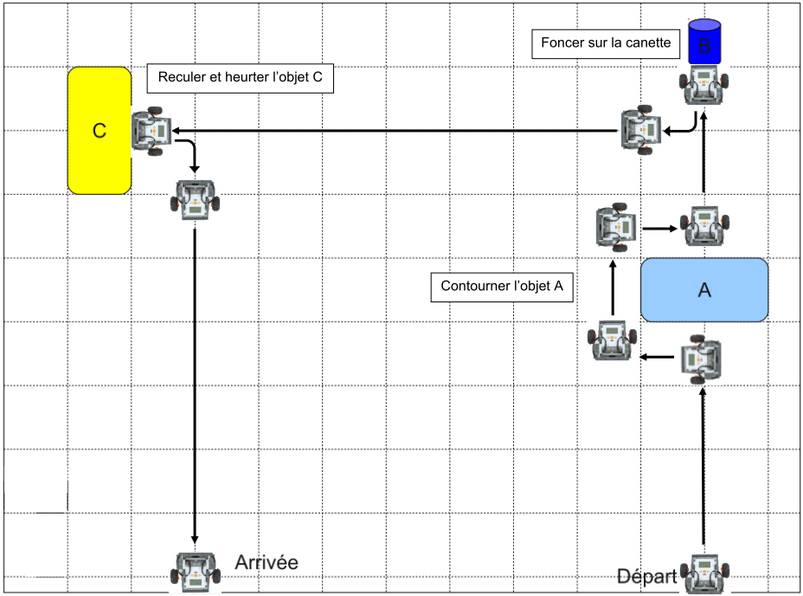
Cliquer sur l'image pour obtenir une version imprimable du schéma.
Note
Avant d’utiliser l’ordinateur pour faire la programmation, il est important de bien planifier l’itinéraire (le trajet) que le robot aura à parcourir.
1. Planifier l’itinéraire
2. Faire la programmation en équipe (logiciel : EV3 Programming)
3. Faire la démonstration à l’enseignant
Avant d’utiliser l’ordinateur pour faire la programmation, il est important de bien planifier l’itinéraire (le trajet) que le robot aura à parcourir.
1. Planifier l’itinéraire
2. Faire la programmation en équipe (logiciel : EV3 Programming)
3. Faire la démonstration à l’enseignant
Retour réflexif
- Comment avez-vous procédé pour relever ce défi?
- Quelles ont été vos difficultés?
