
Défi de programmation
|
Face au mur (défi assisté: la programmation est fournie pour ce défi)
|
|
Mise en situation
Votre robot est placé face à un mur tel qu'illustré ci-contre. Pour se sortir du coin, il doit respecter les consignes suivantes:
Question: Quelle est la première action que le robot doit poser: avancer ou déterminer s'il y a un obstacle devant lui? |
|
Face au mur
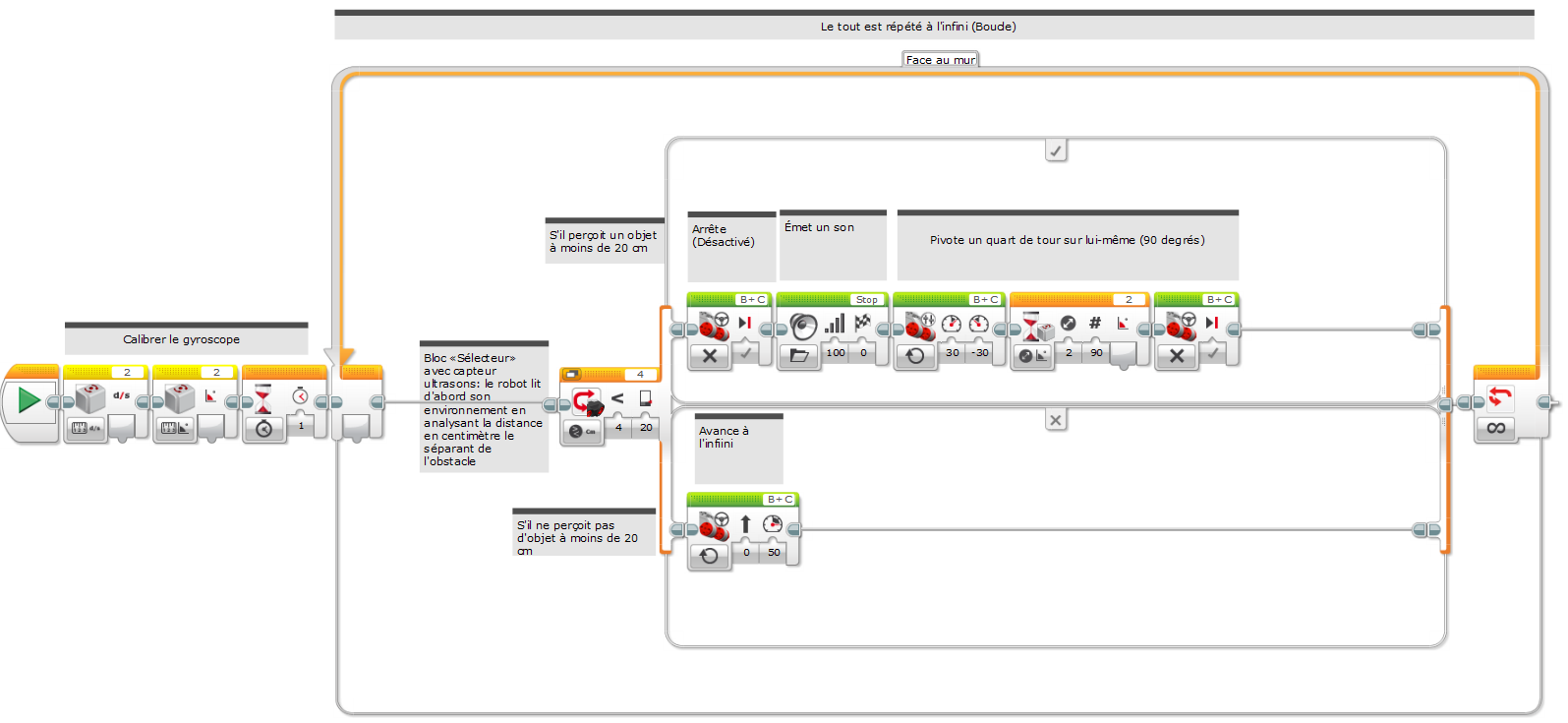
Votre robot doit, à partir du point de départ illustré sur le schéma et face au mur, faire le tour de la salle en longeant les murs.
Avant de se déplacer, il doit prendre une lecture de son environnement:
Le bloc "Sélecteur" dans cette situation permet au robot de lire son environnement d'abord, puis de réagir selon deux séquences distinctes par la suite.
Votre robot doit, à partir du point de départ illustré sur le schéma et face au mur, faire le tour de la salle en longeant les murs.
Avant de se déplacer, il doit prendre une lecture de son environnement:
- Y a-t-il un obstacle devant lui, disons à l'intérieur d'une distance de 20 cm?
- Si oui, il doit pivoter de 90 degrés et lire son environnement à nouveau
- Si non, il avance à l'infini
Le bloc "Sélecteur" dans cette situation permet au robot de lire son environnement d'abord, puis de réagir selon deux séquences distinctes par la suite.
- Observer la séquence de programmation annotée ci-dessous. Les annotations vous permettront de comprendre cette programmation. Voir la "Zone vidéo" si vous avez besoin d'aide supplémentaire.
- Faire cette programmation avec le logiciel, et en faire l'essai.
Cliquez l'image pour l'agrandir

Ce(tte) œuvre est mise à disposition selon les termes de la Licence Creative Commons Attribution - Pas d’Utilisation Commerciale - Partage dans les Mêmes Conditions 4.0 International.
