PINCE
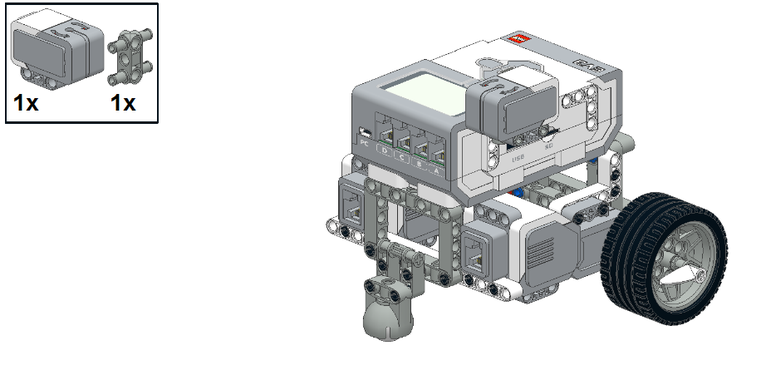
PRÉALABLES
Démonter le capteur de couleurs et le capteur à ultrasons, ils seront placés différemment ici.
Déplacer le capteur gyroscopique comme suit:
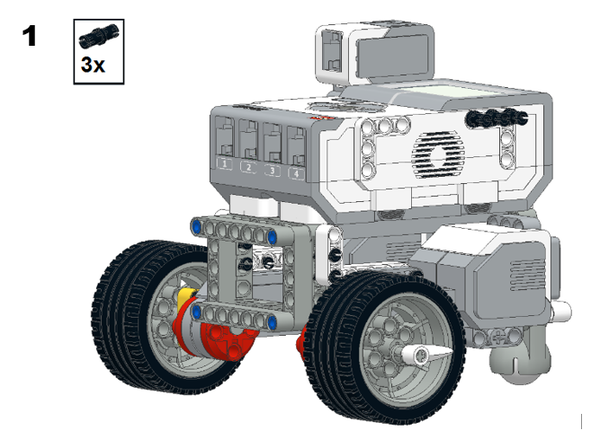
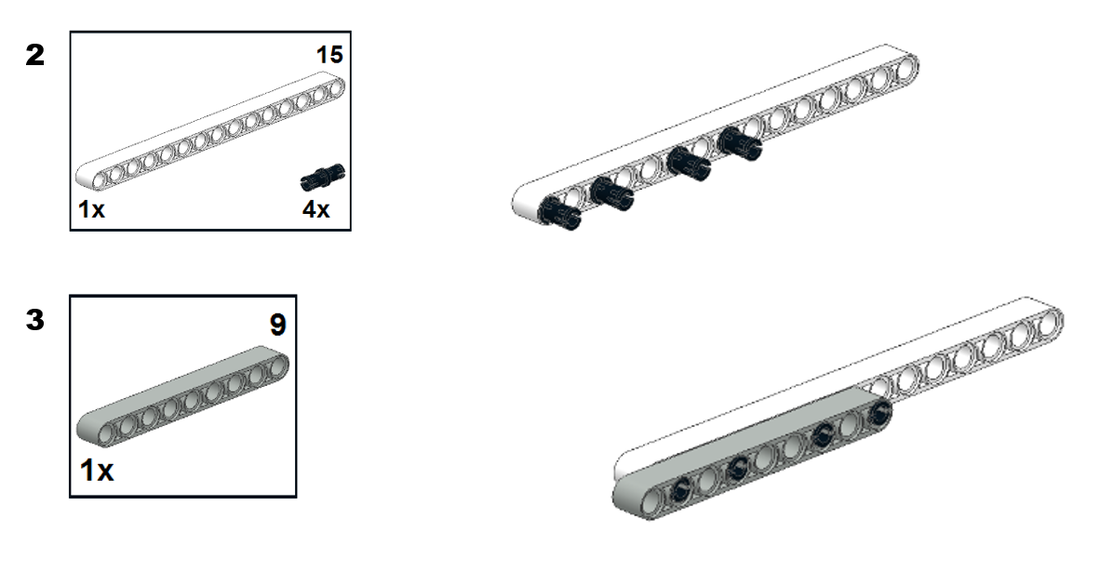
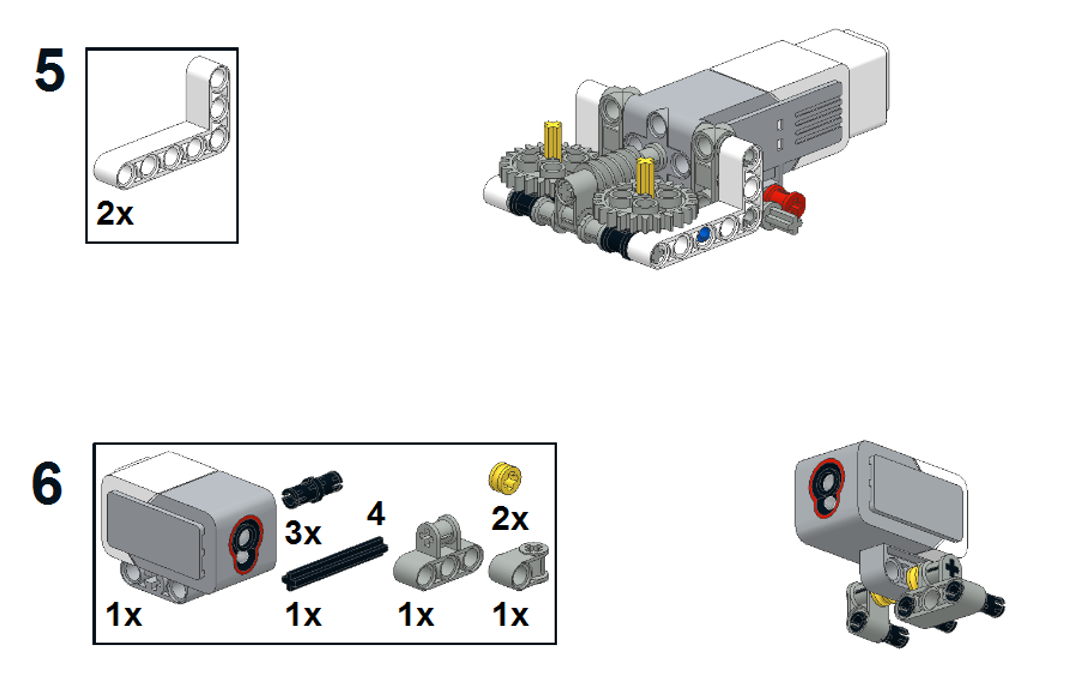
Fabrication d'un nouveau support pour le capteur à ultrasons
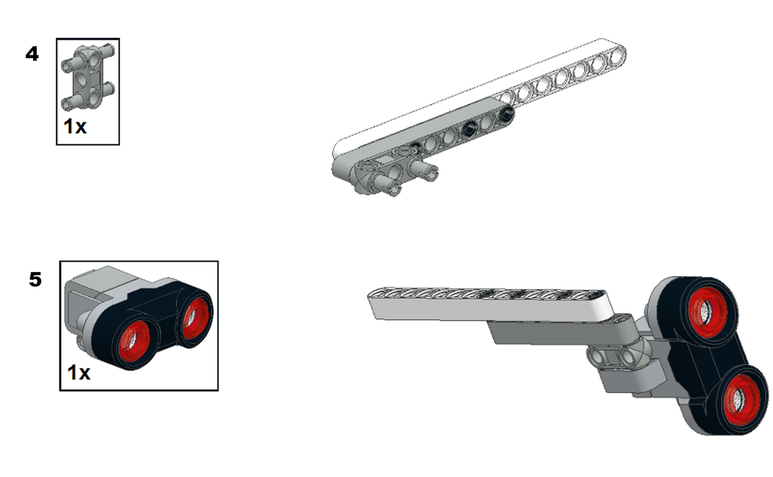
Brancher le capteur à ultrasons dans le port 4
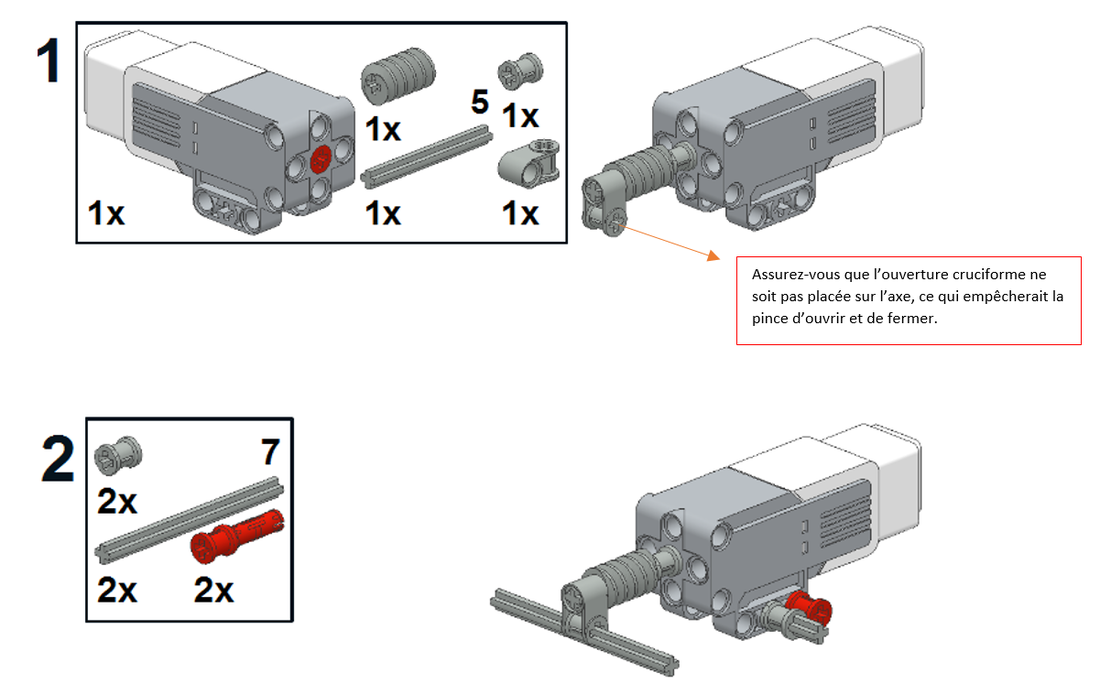
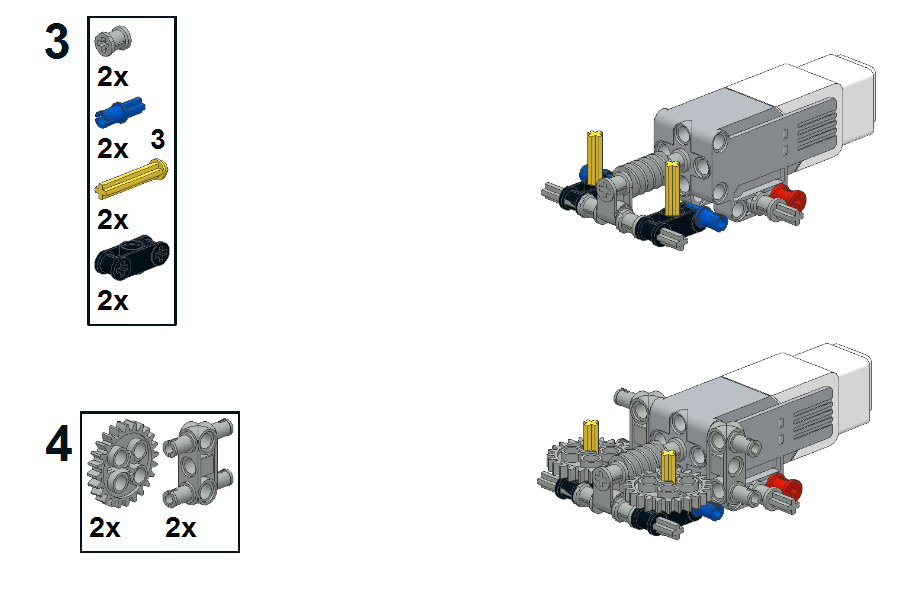
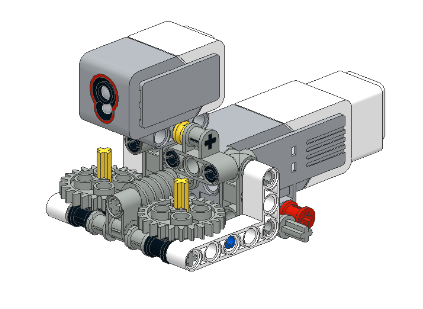
Montage de la pince
Brancher le capteur de couleurs au reste du montage |
|
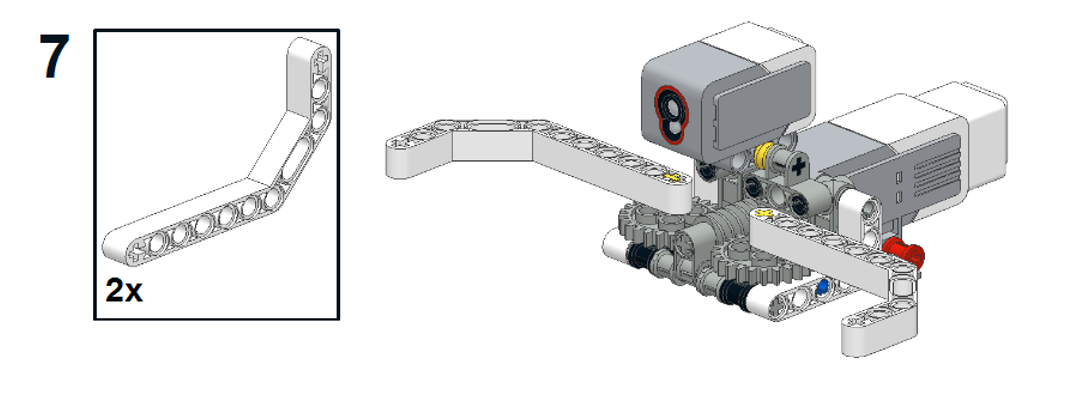
Brancher le capteur de couleurs dans le port 3, remplacer le capteur tactile par la pince et brancher le moteur moyen dans le port A.
|
Vue du dessous
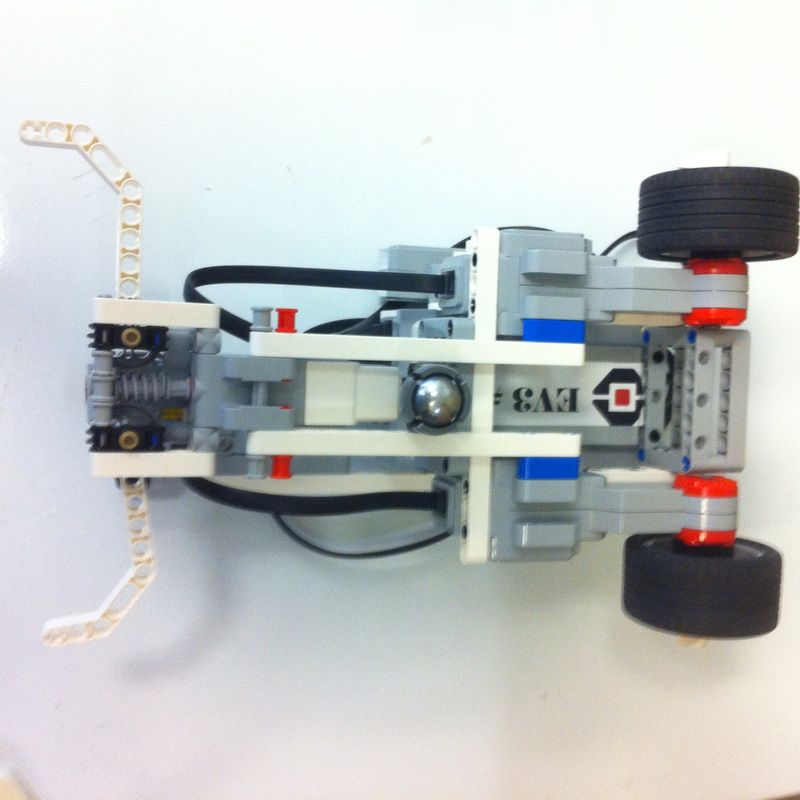
|
Vue du dessus
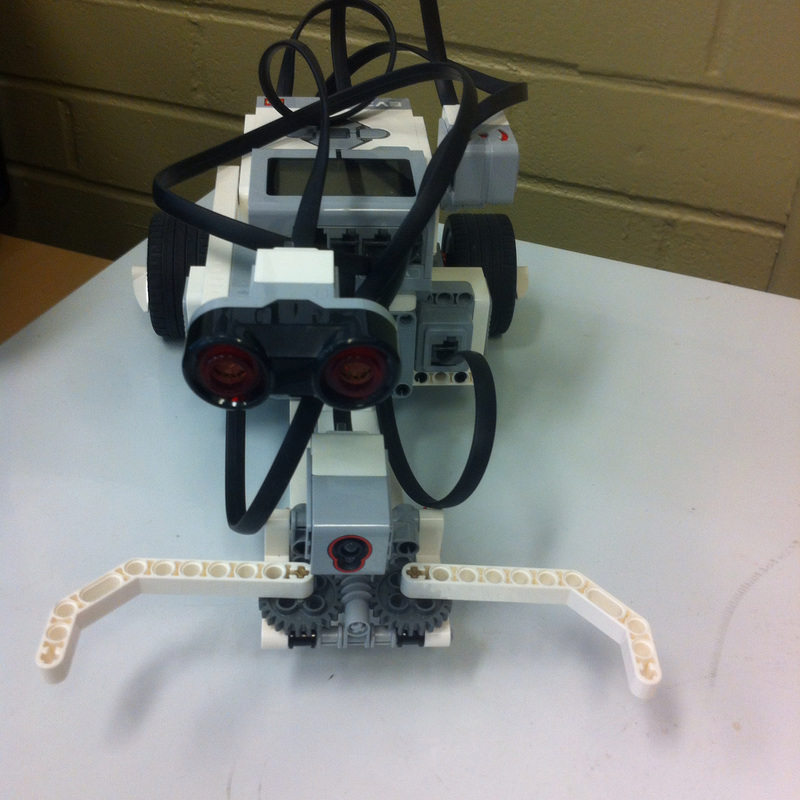
|
